
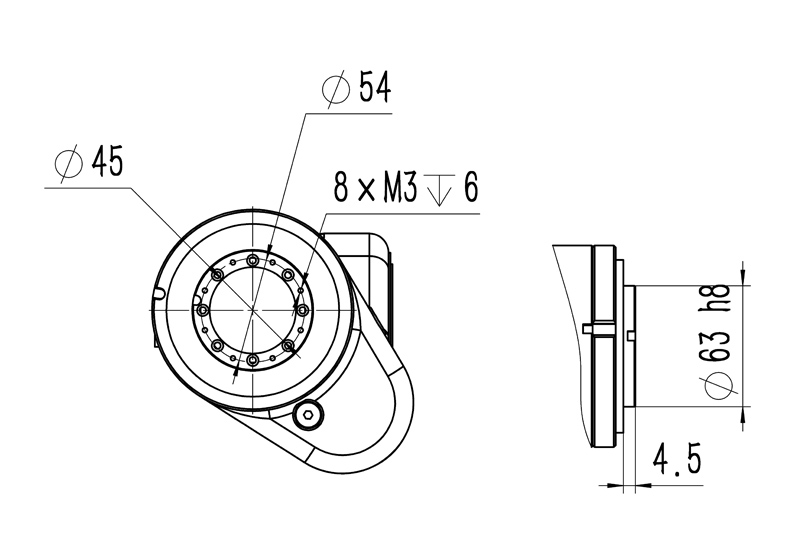
全新一代HSR-JH605机器人拥有小臂中空结构,主要为焊接领域而生,让夹具信号线、气管布线更合理且远离外部设备干扰。
应用领域:弧焊、涂胶、搬运
| 工业机器人 | HSR-JH605 | |
|---|---|---|
| 自由度 | 6 | |
| 最大负载 | 5Kg | |
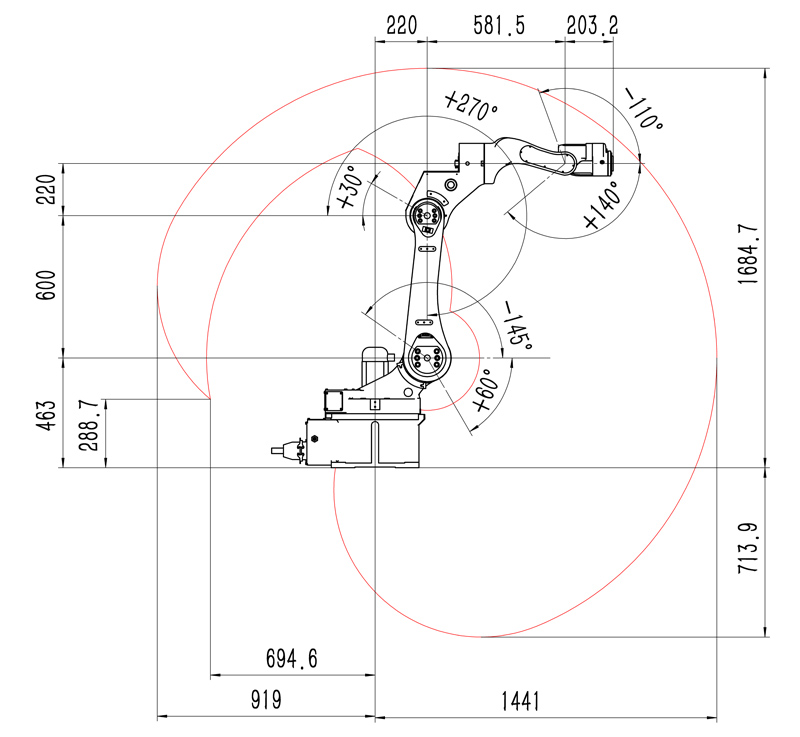
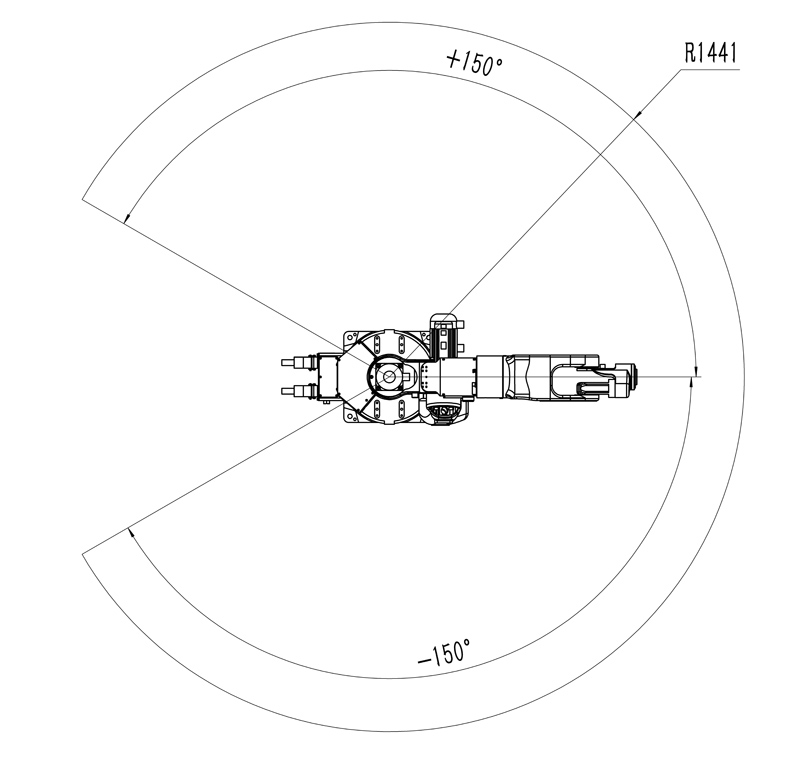
| 最大工作半径 | 1441mm | |
| 重复定位精度 | ±0.06mm | |
| 运动范围 | J1 | ±150° |
| J2 | -145°/+60° | |
| J3 | +30°/+270° | |
| J4 | ±120° | |
| J5 | -110°/+140° | |
| J6 | ±360° | |
| 额定速度 | J1 | 2.58rad/s,148°/s |
| J2 | 2.58rad/s,148°/s | |
| J3 | 2.58rad/s,148°/s | |
| J4 | 3.93rad/s,225°/s | |
| J5 | 3.93rad/s,225°/s | |
| J6 | 3.93rad/s,225°/s | |
| 最高速度 | J1 | 3.87rad/s,222°/s |
| J2 | 3.87rad/s,222°/s | |
| J3 | 3.87rad/s,222°/s | |
| J4 | 5.89rad/s,337.5°/s | |
| J5 | 5.89rad/s,337.5°/s | |
| J6 | 5.89rad/s,337.5°/s | |
| 容许惯性矩 | J6 | 0.035kg.m2 |
| J5 | 0.3 kg.m2 | |
| J4 | 0.3 kg.m2 | |
| 容许扭矩 | J6 | 15 N·m |
| J5 | 35 N·m | |
| J4 | 35 N·m | |
| 适用环境 | 温度 | 0~45° |
| 湿度 | 20%~80% | |
| 其他 | 避免与易燃易爆或腐蚀性气体、液体接触,远离电子噪声源(等离子) | |
| 示教器线缆长度 | 8米 | |
| 本体-柜体连接线长度 | 5米 | |
| I/O参数 | 数字量:32输入,31输出(控制柜故障指示灯输出占用1) | |
| 本体预留信号线 | 无 | |
| 预留气路 | 无 | |
| 电源容量 | 2.5kVA | |
| 额定功率 | 2kW | |
| 额定电压 | 单相AC220V 50HZ | |
| 额定电流 | 10.8A | |
| 本体防护等级 | IP50 | |
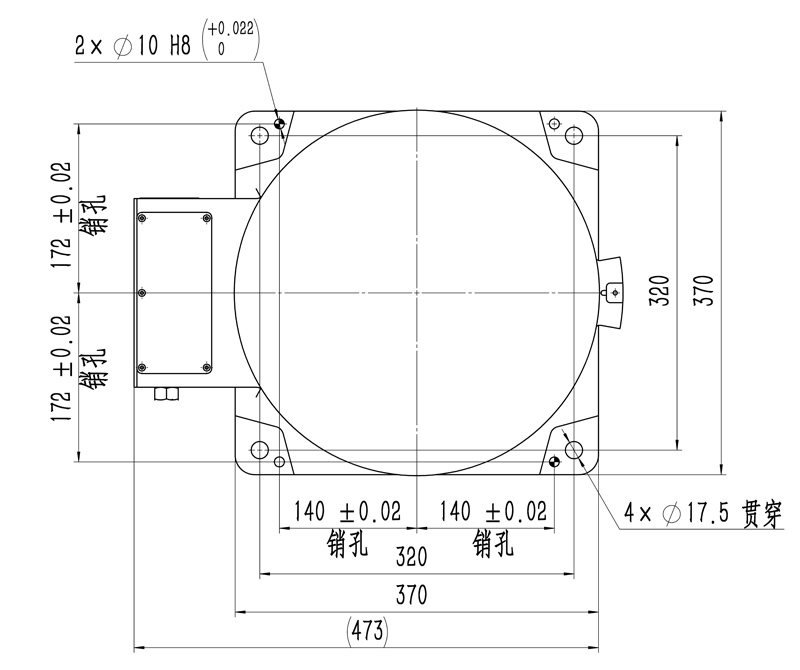
| 安装方式 | 地面安装、倒挂安装、侧挂安装 | |
| 本体重量 | 196kg | |
| 控制柜防护等级 | IP50(本体) | |
| 控制柜重量 | 50kg | |
| 控制柜尺寸 |
640mm(宽)*460mm(厚)*620mm(高)-立式 |
|

 公司简介
公司简介 企业文化
企业文化 发展历程
发展历程 公司风采
公司风采 公司荣誉
公司荣誉 公司新闻
公司新闻 产品资讯
产品资讯 行业新闻
行业新闻 视觉点胶控制系统
视觉点胶控制系统 手机辅料贴附系统
手机辅料贴附系统 高性能运动控制卡
高性能运动控制卡 总线型软件运动控制器
总线型软件运动控制器 辅助产品
辅助产品 点胶行业
点胶行业 电子行业
电子行业 机械行业
机械行业 自动化流水线
自动化流水线 工业机器人
工业机器人 销售网络
销售网络 应用支持
应用支持 售后服务
售后服务 下载中心
下载中心

